- 유머가 아닌 펌글, 영상 등 가볍게 볼 수 있는 글들도 게시가 가능합니다.
- 여러 회원들이 함께 사용하기 위해 각 회원당 하루 5개로 횟수제한이 있습니다.
- 특정인 비방성 자료는 삼가주십시오.
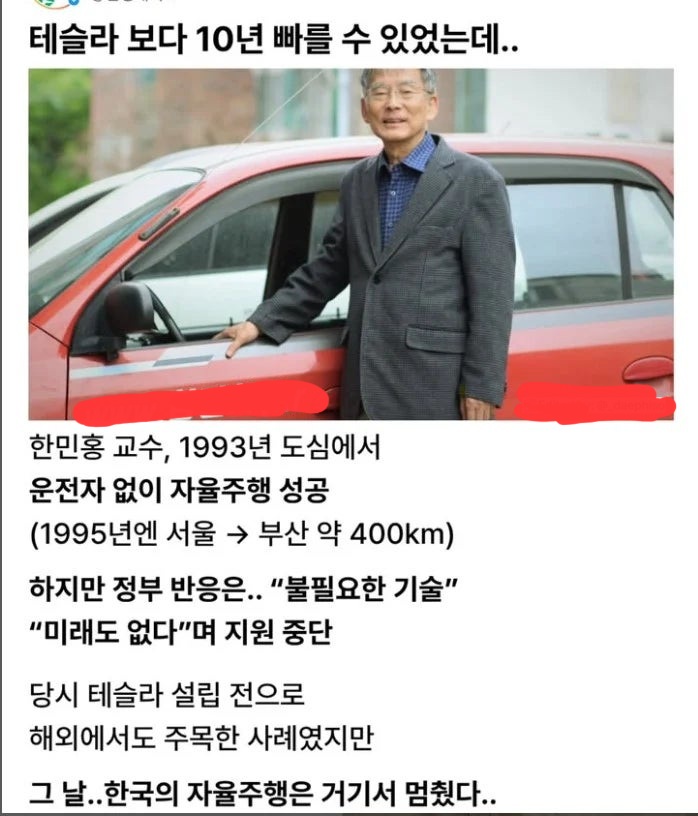
1995년의 기술론 답이 없었던게 맞습니다.
조금 더 연구한다 하더라도, 완벽한 자율주행 기술이 가능하려면 무엇을 수행해야하는지 로드맵을 만드는 선에서 끝났을테죠.
조금 더 연구한다 하더라도, 완벽한 자율주행 기술이 가능하려면 무엇을 수행해야하는지 로드맵을 만드는 선에서 끝났을테죠.
그나마 가장 자율주행스럽다는 테슬라의 자율 주행까지 도달하기 위해 필요한것만 봐도요..
1. PB 단위 혹은 EB일지도 모르는 저장공간
95년 저장장치 용량이 이제야 HDD 하나당 수 GB까진 갔나요?
2. 병렬 연산이 가능한 벡터 프로세서
GPGPU? 멀티 코어 CPU..
90년대의 슈퍼컴퓨터가 수 TFLOPS였고, RTX 5090이 FP32로 104.8 TFLOPS라네요.
연산능력이 안됩니다.
3. 퍼셉트론 -> 멀티 레이어 퍼셉트론 -> 인공신경망 -> 딥러닝
저 시절의 AI요? 퍼지 ... 더 보기
1. PB 단위 혹은 EB일지도 모르는 저장공간
95년 저장장치 용량이 이제야 HDD 하나당 수 GB까진 갔나요?
2. 병렬 연산이 가능한 벡터 프로세서
GPGPU? 멀티 코어 CPU..
90년대의 슈퍼컴퓨터가 수 TFLOPS였고, RTX 5090이 FP32로 104.8 TFLOPS라네요.
연산능력이 안됩니다.
3. 퍼셉트론 -> 멀티 레이어 퍼셉트론 -> 인공신경망 -> 딥러닝
저 시절의 AI요? 퍼지 ... 더 보기
그나마 가장 자율주행스럽다는 테슬라의 자율 주행까지 도달하기 위해 필요한것만 봐도요..
1. PB 단위 혹은 EB일지도 모르는 저장공간
95년 저장장치 용량이 이제야 HDD 하나당 수 GB까진 갔나요?
2. 병렬 연산이 가능한 벡터 프로세서
GPGPU? 멀티 코어 CPU..
90년대의 슈퍼컴퓨터가 수 TFLOPS였고, RTX 5090이 FP32로 104.8 TFLOPS라네요.
연산능력이 안됩니다.
3. 퍼셉트론 -> 멀티 레이어 퍼셉트론 -> 인공신경망 -> 딥러닝
저 시절의 AI요? 퍼지 이론, 전문가 시스템요.
4. 센서
라이다는 여전히 비쌌죠. 그때는요?
영상 입력에 필요한 CCD 소자로는 아직 수만 화소뿐이었어요.
그때 쓸모 있는건 거리 탐지정도가 최선이네요.
5. 엔진 전자 제어
90년대에 ECU는 막 나온 기술이었죠.
Drive-by-wire에 해당하는 기술은 한참 뒤입니다.
6. 내비게이션
모든 도로 지도와 교통 상태를 받아와서 경로를 짜는 시스템은 모두가 아시다시피 한참 뒤의 일입니다.
애초에 도로가 전산화도 되지 않았잖아요.
그냥 저땐 멈추는게 맞습니다.
1. PB 단위 혹은 EB일지도 모르는 저장공간
95년 저장장치 용량이 이제야 HDD 하나당 수 GB까진 갔나요?
2. 병렬 연산이 가능한 벡터 프로세서
GPGPU? 멀티 코어 CPU..
90년대의 슈퍼컴퓨터가 수 TFLOPS였고, RTX 5090이 FP32로 104.8 TFLOPS라네요.
연산능력이 안됩니다.
3. 퍼셉트론 -> 멀티 레이어 퍼셉트론 -> 인공신경망 -> 딥러닝
저 시절의 AI요? 퍼지 이론, 전문가 시스템요.
4. 센서
라이다는 여전히 비쌌죠. 그때는요?
영상 입력에 필요한 CCD 소자로는 아직 수만 화소뿐이었어요.
그때 쓸모 있는건 거리 탐지정도가 최선이네요.
5. 엔진 전자 제어
90년대에 ECU는 막 나온 기술이었죠.
Drive-by-wire에 해당하는 기술은 한참 뒤입니다.
6. 내비게이션
모든 도로 지도와 교통 상태를 받아와서 경로를 짜는 시스템은 모두가 아시다시피 한참 뒤의 일입니다.
애초에 도로가 전산화도 되지 않았잖아요.
그냥 저땐 멈추는게 맞습니다.
어디까지나 성공을 뭐라고 정의하느냐에 달렸겠죠.
주변 교통 흐름에 영향을 주는것과 관계 없이 정속 주행으로 마지막 차선으로 달리면서,
20km쯤 달리면 우회전하고 nn km쯤 달리면 좌회전하기, 앞 차와 가까워지면 제동하기,
열악한 디지털 카메라로 신호를 받아 붉은색이면 멈추기, 녹색이면 가기, (고려된 신호등 내에서만)
정도면 어쨌든 갈 순 있거든요. 똑같은걸 또 시도한다 해서 성공할 가능성도 낮죠.
저때의 기술력을 발전시켜봐야 지금의 스마트 크루즈조차 써먹기에 어려웠을 겁니다.
주변 교통 흐름에 영향을 주는것과 관계 없이 정속 주행으로 마지막 차선으로 달리면서,
20km쯤 달리면 우회전하고 nn km쯤 달리면 좌회전하기, 앞 차와 가까워지면 제동하기,
열악한 디지털 카메라로 신호를 받아 붉은색이면 멈추기, 녹색이면 가기, (고려된 신호등 내에서만)
정도면 어쨌든 갈 순 있거든요. 똑같은걸 또 시도한다 해서 성공할 가능성도 낮죠.
저때의 기술력을 발전시켜봐야 지금의 스마트 크루즈조차 써먹기에 어려웠을 겁니다.
그래서 제가 보기엔 연구팀은 저 1회의 성공 이후로.. "그보다 더 뛰어난 것을 지금 만들 순 없다"는걸 스스로도 알았을 겁니다.
저 시점에서 시도하던 전문가 시스템은 곧 한계를 맞이했고, 정해진 몇몇 코스에서만 자율주행이 가능한 수준에 머물렀고, 그부분을 아무리 갈고 닦아봐야 공장 자동화 정도에나 쓸 기술이었거든요.
모든걸 해결할 기술로 인공신경망 개념이 제안되긴했지만... 그 이후로 20년간 "하드웨어의 성능이 충분히 오를때까지" 암흑기에 빠지고 말았어요.
이 모든걸 저 연구진이 대신 해줄 수도 없었거니와, 핵심인 "하드웨어 발전"은 인공지능과는 하등 관계없는 반도체 업계에서 최선을 다해 조단위의 돈을 때려박아 진행해 온 거죠.
저 시점에서 시도하던 전문가 시스템은 곧 한계를 맞이했고, 정해진 몇몇 코스에서만 자율주행이 가능한 수준에 머물렀고, 그부분을 아무리 갈고 닦아봐야 공장 자동화 정도에나 쓸 기술이었거든요.
모든걸 해결할 기술로 인공신경망 개념이 제안되긴했지만... 그 이후로 20년간 "하드웨어의 성능이 충분히 오를때까지" 암흑기에 빠지고 말았어요.
이 모든걸 저 연구진이 대신 해줄 수도 없었거니와, 핵심인 "하드웨어 발전"은 인공지능과는 하등 관계없는 반도체 업계에서 최선을 다해 조단위의 돈을 때려박아 진행해 온 거죠.

| 목록 |
|